不請自來。
我回答這個問題只是為了整理和總結我所學的知識。
許多理論力學書籍的最后幾章都討論了虛功原理。 當你學習理論力學時,你可能會發現虛功原理這一部分的“氣質”與本書的其余部分有些不相容。 它更注重理論推導,而不是通過繪制力分析圖來獲得直觀的答案。 其實,這與經典力學的發展歷史有關。 有興趣的同學可以在《力學史雜談》中搜索吳繼科寫的《經典力學發展的兩條路徑》。 這里我們主要回答題主的問題:虛擬工作的原理是什么,它到底能做什么。
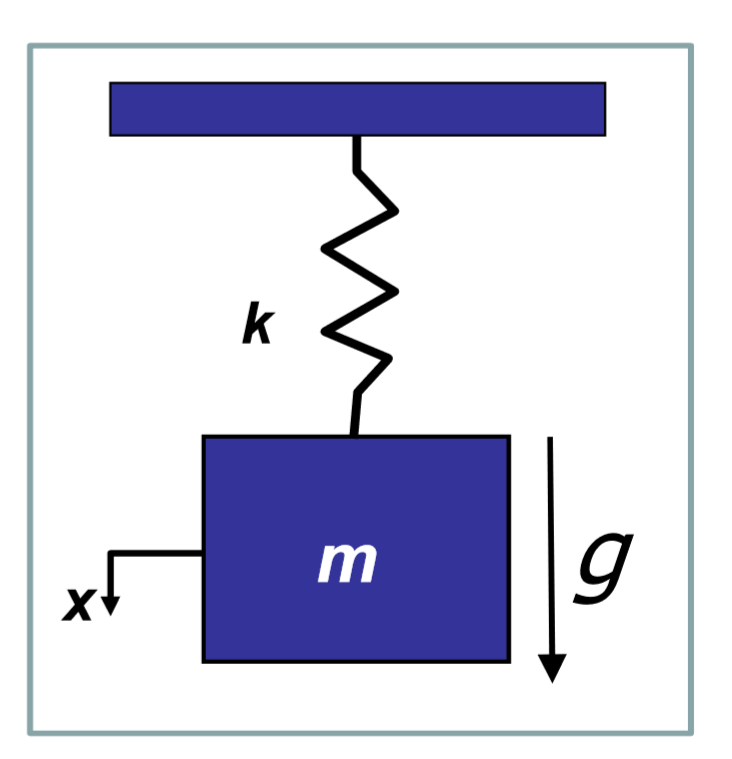
虛功原理的思想實際上起源于歐洲的伯努利家族,后來在拉格朗日的《分析力學》中得到了體現。 利用虛功原理可以推導出拉格朗日方程。 好了,那些看不懂的東西我們就不去管了,直接上圖吧。 如圖,這是最簡單的彈簧,上面掛著一個小塊m。
大公理工大學鐘萬協院士在講座中通過引入彈簧的問題,可以清晰地解釋整個拉格朗日系統和哈密頓系統的主要思想。 虛擬工作原理是拉格朗日系統的墊腳石。 這里我也用彈簧的問題來解釋一下虛功的原理。 我保證只要學過高中物理,下面的推導就能理解。
在這個模型中,外力是彈簧上物體的重力,G=mg。 高中知識吧? 那么當加上這個外力時,彈簧就產生了變形,這個變形就相當于外力對彈簧所做的功。 彈簧存儲了這項工作。 我們稱之為應變能或彈性勢能。
V=frac{1}{2} kx^{2}
這個1/2從哪里來? 這里的彈性勢能可以理解為彈簧內力(即彈力F=kx)對彈簧變形所做的負功的積分。即可以寫為
V=frac{1}{2} F x
彈簧的內力為F=kx,變形從0逐漸增大到x時所做的功。
到目前為止功等于什么,這都是高中知識。 虛功原理是指當系統處于平衡狀態時,如果給該系統一個虛位移δx,則外力對虛位移所做的功等于內力對系統所做的功。虛擬位移。 我們來驗證一下:
外力G=mg虛位移所做的功
W_{1} =Gdelta x
內力 F = kx 對虛擬位移所做的功
W_{2} =Fdelta x
將兩者相等,并消除左右虛擬位移,我們發現什么? kx=mg,求x,即系統處于平衡狀態時對應的x。
這里,彈簧的內力對虛擬位移所做的功實際上是前一個彈簧的勢能的一階變化。
這道題簡單到高中生一看就知道結果。 看起來,用虛功原理和力量平衡的原理來解決,并沒有什么區別。
但當問題從彈簧變為簡支梁時,情況就不同了。 雖然事實上簡支梁也是線彈性體。 如果你愿意的話,你當然可以把梁的反力方程中除了x之外的所有項放在一起,并設置為k,這樣問題就和彈簧的問題一模一樣了。
—————————————————
當你的系統不再是一個簡單的彈簧小塊,而是變成一維梁、二維板、三維混凝土時,剛才的虛功原理會發生什么變化呢?
彈性體受力后會發生一定程度的變形功等于什么,最終達到平衡狀態。 當平衡時滿足邊界條件時(對于梁來說是鉸接節點或剛體節點物理資源網,對于板來說是中間支撐邊或夾層支撐邊的條件),空間彈性體的位移場可以為用x、y、z、v、w這三個函數u來表示。
由此,可以建立彈性體的應變能函數U——獨立函數為u、v、w,函數值為彈性體的應變能。 這里的虛功原理也稱為虛位移原理:給定一個虛位移δx,所有外力對該虛位移所做的功δW等于內力所做的功δU關于虛擬位移。

δU=δW
外部虛功等于內部虛功。 這個方程與上面的彈簧問題相似嗎?
通過求解這個方程,我們得到了彈性體的真實位移場,它對應于上面彈簧問題中的x。
進一步,我們假設彈性體的應變勢能為U,外力勢能為V(這里V的絕對值為負)。 這里,U和V都是位移u、v、w的函數。 各種公式介紹了變分法。 書上都有,這里就不提了。 彈性體的總勢能為PI=U+V。
求解時,首先建立滿足位移邊界條件的位移場函數的形式。 它可以是多項式形式或三角函數形式。 只要滿足邊界條件,任何一種方法都有效。 該位移場函數中可能存在許多未定系數,如C1、C2、C3等。 無論取多少個系數,該位移場都能滿足位移邊界條件。 那么哪個才是真正的位移場呢?
最小勢能原理告訴我們,真實的位移場使總勢能泛函最小,即PI剛才的變化為零。
δPI=δU+δV=0
注意,我剛才說V的絕對值為負數。 到了等號的另一邊,就變成剛才的虛功原理了。
δU=δW
因此,最小勢能原理是虛功原理的等價形式。
您可以說,在所有可能的位移中,處于平衡狀態的位移使系統的總勢能最小化。 等效的說法是,在平衡位置,外力的虛功等于內力的虛功。
至于最小勢能原理和變分法有什么用,請關注我的另一個回答: