3D成像方式匯總介紹:
這兒要介紹的是真正的3D成像,得到物體三維的圖形,是立體的圖象。
而不是利用人眼視覺差別的特性,錯誤感知到的假三維信息。
原理上分類:主要常用有:
1、雙目立體視覺法()
2、激光三角法(Laser)
3、結構光3D成像(light3D)
4、飛行時間法ToF(Timeof)
5、光場成像法(Lightfieldof)
6、全息投影技術(Front-)
7、補充:揭破假全息
里面原理之間可能會有交叉。
而激光雷達不是3D成像原理上的一個分類,而是一種具體方式。
激光雷達的3D成像原理有:三角測距法、飛行時間ToF法等。
激光雷達根據實現方法分類有:機械式、混合固態、基于光學相控陣固態、基于MEMS式混和固態、基于FLASH式固態等。
1、雙目立體視覺法:
就和人的兩個耳朵一樣,各類兩個攝像頭的手機大就會用這些方式來獲得深度信息,進而得到三維圖象。但深度遭到兩個攝像頭之寬度離的限制。
視差圖:雙目立體視覺融合兩只耳朵獲得的圖象并觀察它們之間的差異,使我們可以獲得顯著的深度感,構建特點間的對應關系眼鏡透鏡成像原理,將同一空間化學點在不同圖象中的映像點對應上去,這個差異,我們也稱視差()圖象。對于視差的理解可以自己體驗一下:將右手頭置于離雙眼不同距離的位置,并輪換睜、閉左右眼,可以發覺右手在不同距離的位置,視覺差也不同,且距離越近,視差越大。
提及視差圖,就有深度圖,深度圖象也叫距離影像,是指將從圖象采集器到場景中各點的距離(深度)值作為象素值的圖象。
深度圖與點云的區別,點云:當一束激光照射到物體表面時,所反射的激光會攜帶方位、距離等信息。若將激光束根據某種軌跡進行掃描,便會邊掃遮罩記錄到反射的激光點信息,因為掃描極為精細,則才能得到大量的激光點,因此就可產生激光點云。深度圖象經過座標轉換可以估算為點云數據;有規則及必要信息的點云數據可以反算為深度圖象。二者在一定條件下是可以互相轉化的。
雙目立體視覺由三角法原理進行三維信息的獲取,即由兩個攝像機的圖象平面和被測物體之間構成一個三角形。已知兩個攝像機之間的位置關系和物體在左右圖象中的座標,便可以獲得兩攝像機公共視場內物體的三維規格及空間物體特點點的三維座標。所以,雙目視覺系統通常由兩個攝像機構成。
深度和視差成正比。
2、激光三角法
單點激光測距原理:(同屬于下邊結構光原理)
單點激光測距原理圖如右圖。
激光頭Laser與攝像頭在同一水平線(稱為基準線)上,其距離為s,攝像頭焦距為f,激光頭與基準線的傾角為β。激光頭Laser與攝像頭在同一水平線(稱為基準線)上,其距離為s,攝像頭焦距為f,激光頭與基準線的傾角為β。假定目標物體在片狀激光器的照射下,反射回攝像頭成像平面的位置為點P。假定目標物體在片狀激光器的照射下,反射回攝像頭成像平面的位置為點P。
由幾何知識可作相像三角形,激光頭、攝像頭與目標物體組成的三角形,相像于攝像頭、成像點P與輔助點P′。P與輔助點P′。
設PP′=x,q、d如圖所示,則由相像三角形可得:PP′=x,q、d如圖所示,則由相像三角形可得:f/x=q/s==>q=fs/x
X可分為兩部份估算:X=x1+x2=f/tanβ+*
其中是象素單位大小,是成像的象素座標相對于成像中心的位置。
最后,可求得距離d:d=q/sinβ
線狀激光三角測距原理:(同屬于下邊結構光原理)
將激光光條的中心點P1、成像點P1′、攝像頭、激光頭作為基準面,中心點P1就符合單點結構光測距。對于任一點(該點不在基準面上),也可由三角測距得出。將激光光條的中心點P1、成像點P1′、攝像頭、激光頭作為基準面,中心點P1就符合單點結構光測距。對于任一點(該點不在基準面上),也可由三角測距得出。
如上圖所示,將成像平面鏡像到另左側。其中P1′,P2′和分別是P1和P2的成像位置,對于點P2、成像點P2′、攝像頭、激光頭所產生的平面,與基準面存在傾角θ,也符合單點結構光測距。此時的焦距為f′,x的幾何意義同單點激光測距原理。如上圖所示,將成像平面鏡像到另左側。其中P1′,P2′和分別是P1和P2的成像位置,對于點P2、成像點P2′、攝像頭、激光頭所產生的平面,與基準面存在傾角θ,也符合單點結構光測距。此時的焦距為f′,x的幾何意義同單點激光測距原理。
d'/=f'/x
d′是P2與所成平面上P2到斜邊的高(類比于單點激光測距原理中的q)。同樣x可分為兩部份估算d′是P2與所成平面上P2到斜邊的高(類比于單點激光測距原理中的q)。同樣x可分為兩部份估算:
x=f'/tanβ+*
上述中的平面與基準面的傾角為θ上述中的平面與基準面的傾角為θ:
f'/f=cosθtanθ=(|P2'.y-P1'.y|)/f
可求得f′:可求得f′:f'=f/cos(((P2'.y-P1'.y)/f))
3、結構光3D成像法
OPPOFindX和等手機的后置攝像頭紛紛搭載。
單從光源本身理解哪些是結構光:就是帶有一定結構的,但是我們自己是曉得光源的這些結構的。
結構光三維視覺是基于光學三角檢測原理。光學投射器將一定模式的結構光透射于物體表面,在表面上產生由被測物體表面形狀所調制的光條三維圖象。該三維圖象由處于另一位置的攝像機偵測,因而獲得光條二維畸變圖象。光條的畸變程度取決于光學投射器與攝像機之間的相對位置和物體表面形狀輪廓(高度)。直觀上,順著光條顯示出的位移(或則偏斜)與物體表面高度成比列,扭結表示了平面的變化,不連續顯示了表面的化學間隙。當光學投射器與攝像機之間的相對位置一定時,由畸變的二維光條圖象座標便可再現物體表面三維形狀輪廓。由光學投射器、攝像機、計算機系統即構成了結構光三維視覺系統。
依據光學投射器所投射的光束模式的不同,結構光模式又可分為點結構光模式、線結構光模式、多線結構光模式、面結構光模式、相位法等。
點結構光模式:(和前面介紹的三角測距一樣)如圖所示,激光器發出的光束投射到物體上形成一個光點,光點經攝像機的鏡頭成像在攝像機的像平面上,產生一個二維點。攝像機的視線和光束在空間中于光點處相交,產生一種簡單的三角幾何關系。通過一定的標定可以得到這些三角幾何約束關系,并由其可以惟一確定光點在某一已知世界座標系中的空間位置。
線結構光模式:(和前面介紹的三角測距一樣)線結構光模式是向物體投射一條光束,光條因為物體表面深度的變化以及可能的間隙而遭到調制,表現在圖象中則是光條發生了畸變和不連續,畸變的程度與深度成反比,不連續則顯示出了物體表面的化學間隙。任務就是從畸變的光條圖象信息中獲取物體表面的三維信息;實際上,線結構光模式也可以說是點結構模式的擴充。過單反光心的視線束在空間中與激光平面相交形成好多交點,在物體表面處的交點則是光條上諸多的光點,因此便產生了點結構光模式中類似的諸多的三角幾何約束。很顯著,與點結構光模式相比較,線結構光模式的檢測信息量大大降低,而其實現的復雜性并沒有降低,從而得到廣泛應用。
多線結構光模式:多線結構光模式是光帶模式的擴充。如圖,由光學投射器向物體表面投射了多條光條,其目的的一方面是為了在一幅圖象中可以處理多條光條,提升圖象的處理效率,另一方面是為了實現物體表面的多光條覆蓋因而降低檢測的信息量,以獲得物體表面更大范圍的深度信息。也就是所謂的“光柵結構模式”,多光條可以采用投影儀投影形成一光柵圖樣,也可以借助激光掃描器來實現。
面結構光模式:當采用面結構光時,將二維的結構光紋樣投射到物體表面上,這樣不須要進行掃描就可以實現三維輪廓檢測,檢測速率很快,光面結構光中最常用的方式是投影光柵白色到物體表面。當投影的結構光紋樣比較復雜時,為了確定物體表面點與其圖象象素點之間的對應關系,需要對投射的紋樣進行編碼,因此這類方式又稱為編碼結構光檢測法。紋樣編碼分為空域編碼和頻域編碼。空域編碼方式只須要一次投射就可獲得物體深度圖,適宜于動態檢測,然而目前幀率和處理速率還未能滿足實時三維檢測要求,并且對解調要求很高。頻域編碼須要將多個不同的投射編碼紋樣組合上去解碼,這樣比較容易實現解碼。主要的編碼方式有二補碼編碼、二維網格紋樣編碼、隨機紋樣編碼、彩色編碼、灰度編碼、鄰域編碼、相位編碼以及混和編碼。
相位法:近些年來基于相位的光柵投影三維輪廓測童技術有了很大的發展,將光柵紋樣投射到被測物表面,受物體高度的調制,光柵白色發生形變,這些變型白色可解釋為相位和振幅均被調制的空間擴頻訊號。采集變型白色而且對其進行譯碼可以得到包含高度信息的相位變化,最后按照三角法原理估算出高度,這類方式又稱為相位法。基于相位檢測的三維輪廓檢測技術的理論根據也是光學三角法,但與光學三角法的輪廓術有所不同,它不直接去找尋和判定因為物體高度變動后的像點,而是通過相位檢測間接地實現,因為相位信息的參與,致使這類方式與單純光學三角法有很大區別。
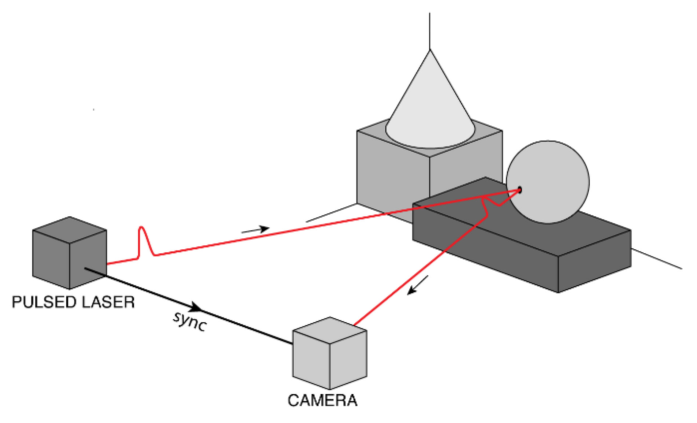
4、飛行時間法ToF
飛行時間是從Timeof譯音過來的,簡稱TOF。其基本原理是通過連續發射光脈沖(通常為不可見光)到被觀測物體上,之后用傳感接收從物體返回的光,通過偵測光脈沖的飛行(往返)時間來得到目標物距離。
TOF法依照調制方式的不同,通常可以分為兩種:脈沖調制()和連續波調制(Wave)。
脈沖調制:脈沖調制方案的原理比較簡單,如右圖所示。它直接按照脈沖發射和接收的時間差來測算距離。
連續波調制:實際應用中,一般采用的是正弦波調制。因為接收端和發射端正弦波的相位偏斜和物體距離攝像頭的距離成反比,因而可以借助相位偏斜來檢測距離。
目前的消費級TOF深度單反主要有:谷歌的2、MESA的、Tango中使用的PMDTech的TOF深度單反等。這種產品早已在體感辨識、手勢辨識、環境建模等方面取得了較多的應用,最典型的就是谷歌的2。
TOF深度單反對時間檢測的精度要求較高,雖然采用最高精度的電子元元件,也很難達到毫米級的精度。為此,在近距離檢測領域,尤其是1m范圍內,TOF深度單反的精度與其他深度單反相比還具有較大的差別,這限制它在近距離高精度領域的應用。
然而,TOF深度單反可以通過調節發射脈沖的頻度改變單反檢測距離;TOF深度單反與基于特點匹配原理的深度單反不同,其檢測精度不會隨著檢測距離的減小而增加,其檢測偏差在整個檢測范圍內基本上是固定的;TOF深度單反抗干擾能力也較強。因而,在檢測距離要求比較遠的場合(如無人駕駛),TOF深度單反具有極其顯著的優勢。
5、光場成像法(Lightfieldof)
光場就是光幅射在空間各個位置各個方向的傳播。
全光函數:全光函數包含7個變量。
空間位置(3D)、特定方向(2D)、特定時刻(1D)、特定波長(1D)
L=p(x,y,z,θ,φ,t,λ)
如圖所示:
若一條光線通過兩個平面UV和ST所形成的交點座標分別為(u,v)和(s,t),此時就可以通過光場函數L(u,v,s,t)來表示這條光線的分布。L代表光線的硬度,而(u,v)和(s,t)共同確定了光線在空間短發布的位置和方向。在四維(u,v,s,t)空間中:一條光線對應光場的一個取樣點。
為何要用這些雙平面的方法來確定光場的分布呢?這是由于常規的單反通常都可以簡化成兩個相互平行的平面——鏡頭的光瞳面和圖象傳感所在的像平面。對于常規的單反來說,每位象素記錄了整個鏡頭所出射光線會聚在一個位置上的硬度。
所以,傳統的單反只能獲取一個像平面的圖象。而假如才能獲取到整個單反內的光場分布情況,我們就可以將光線重新投影到一個虛擬的像平面上,估算出這個新的像平面上所形成的圖象。光場單反的目的就在于對單反的光場分布進行記錄。
光場單反工作原理:光場單反由鏡頭、微透鏡陣列和圖象傳感組成,其中微透鏡陣列是多個微透鏡單元所組成的二維陣列。鏡頭的光瞳面(UV面)和圖象傳感的光敏面(XY面)關于微透鏡陣列(ST)成共軛關系,也就是說,鏡頭經過每位微透鏡單元就會投影到圖象傳感上產生一個小的微透穿衣鏡圖象。每位微透穿衣鏡圖象包含了若干個象素,此時各象素所記錄的光線硬度就來自于一個微透鏡和鏡頭的一個子孔徑區域之間所限制的細光束,如右圖。
這兒的細光束也就是光場的離散取樣方式,通過微透鏡單元的座標ST和鏡頭子孔徑的座標UV即才能確定每位細光束的位置和方向,獲得L(u,v,s,t)的分布。
如右圖:每位宏象素對應于光場的一個位置取樣。宏象素內的每一點對應于光場在該位置的一個方向取樣。光場的位置碼率由取樣問隔決定。光場的方向碼率由每位宏象素內所包含的像元數所決定的。
如何實現數字測光:正如上面所說,獲得單反內的光場分布后,就可以重新選擇一個虛擬的像平面,如上圖。
可以選擇更遠或更近的像面位置,估算出所有的光線在這個平面上的交點位置和能量分布,進而就得到了一幅新像面上的圖象。這個過程等價于傳統單反的變焦過程,只不過是通過數字估算來實現,因此被稱為數字變焦。
借助光場單反的數字變焦能力,只須要一次爆光就可以估算出不同像平面位置的圖象,才能實現大焦段條件下的快速測光。更進一步,借助不同深度平面的圖象序列,可以完成全景深圖象合成、三維深度恐怕等功能。
6、全息投影技術
全息投影技術是借助干涉和衍射原理記錄并重現物體真實的三維圖象的記錄和重現的技術。
其第一步是借助干涉原理記錄物體光波信息,此即拍攝過程:被攝物體在激光輻照下產生漫射式的物光束;另一部份激光作為參考光束射到全息底片上,和物光束疊加形成干涉,把物體光波上各點的位相和振幅轉換成在空間上變化的硬度,因而借助干涉白色間的反差和間隔將物體光波的全部信息記錄出來。記錄著干涉白色的底片經過定影、定影等處理程序后,便成為一張諾利德全息圖,或稱全息相片。
其第二步是借助衍射原理重現物體光波信息,這是成象過程:全息圖如同一個復雜的光柵,在相干激光照射下,一張線性記錄的余弦型全息圖的衍射光波通常可給出兩個象,即原始象(又稱初始象)和共軛象。重現的圖象立體感強,具有真實的視覺效應。全息圖的每一部份都記錄了物體上各點的光信息,故原則上它的每一部份都能重現原物的整個圖象,通過多次爆光還可以在同一張底片上記錄多個不同的圖象,并且能互不干擾地分別顯示下來。
如右圖。離軸全息和同軸全息。
7、其他補充
這兒要解釋一下,人們聽到的舞臺上的立體的療效,不是真正的全息,通常來說,只是一層介質膜,被店家炒概念為全息,只是偽全息。
?
影片院的3D墨鏡和全息更是半分錢關系也沒有,原理是借助了人眼的視差。3D墨鏡有:互補色、偏振光、時多項式。
?
?
?
AR、VR技術和全息關系也不大。
VR虛擬現實就不說了,只是前期把各個位置各個角度的內容錄制合成,后期通過傳感偵測人的動作來對應的切換內容。
AR提高現實,如右圖分兩步,先獲取周圍世界的三維信息,
?
AR提高現實眼鏡透鏡成像原理,如右圖分兩步,先獲取周圍世界的三維信息,再把虛擬的物體添加到里面,獲取三維世界的方式通常是:雙目、TOF、結構光。
?
各類3D墨鏡也沒有真全息成像技術。
Glass:核心元件是:偏振光分光棱鏡PBS,和舞臺上的療效類似。一層偏動圈來給人三維的覺得。
?
?
靈犀科技AR、magicleap、lumus等核心元件使用:陣列波導,一種光波導,把和偏振光分光棱鏡類似,減小了視角。
谷歌的核心元件是:全息波導。注意這兒的全息波導只是一種導波元件,不是全息技術。光柵是在波導的表面:光柵衍射導光。
好,就到這兒。
里面都是本人學習了解過重中整理記錄的,水平有限,難免有些不足疏失錯誤,還望大鱷多多見諒。
參考資料: